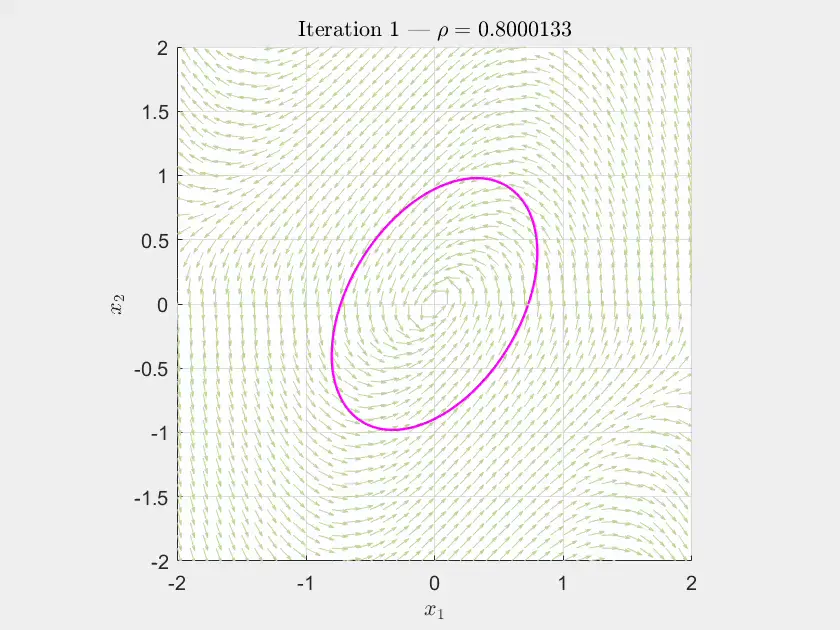
projects Infeasible-start Mehrotra’s Predictor-Corrector IPM Mehrotra vs. standard newton step; line search and initialization logic from scratch ADMM as splitting solver for QP Reproducing the OSQP/SCS Algorithm Logic from scratch Continuous-time Successive Convexification constrained trajectory optimization with continuous-time constraint satisfaction Trajectory Optimization with Orientations Quaternion optimal control with acados, kRRT on manifold, combinatorial optimization Model-Based Fixed-Wing Perching Minimal flat-plate dynamics; data-efficient identification; zero order trajectory optimization; model-based RL via iLQR Region of Attraction Estimation for Polynomial Systems via SOS with Bi-level Optimization by SPOT,YALIMP