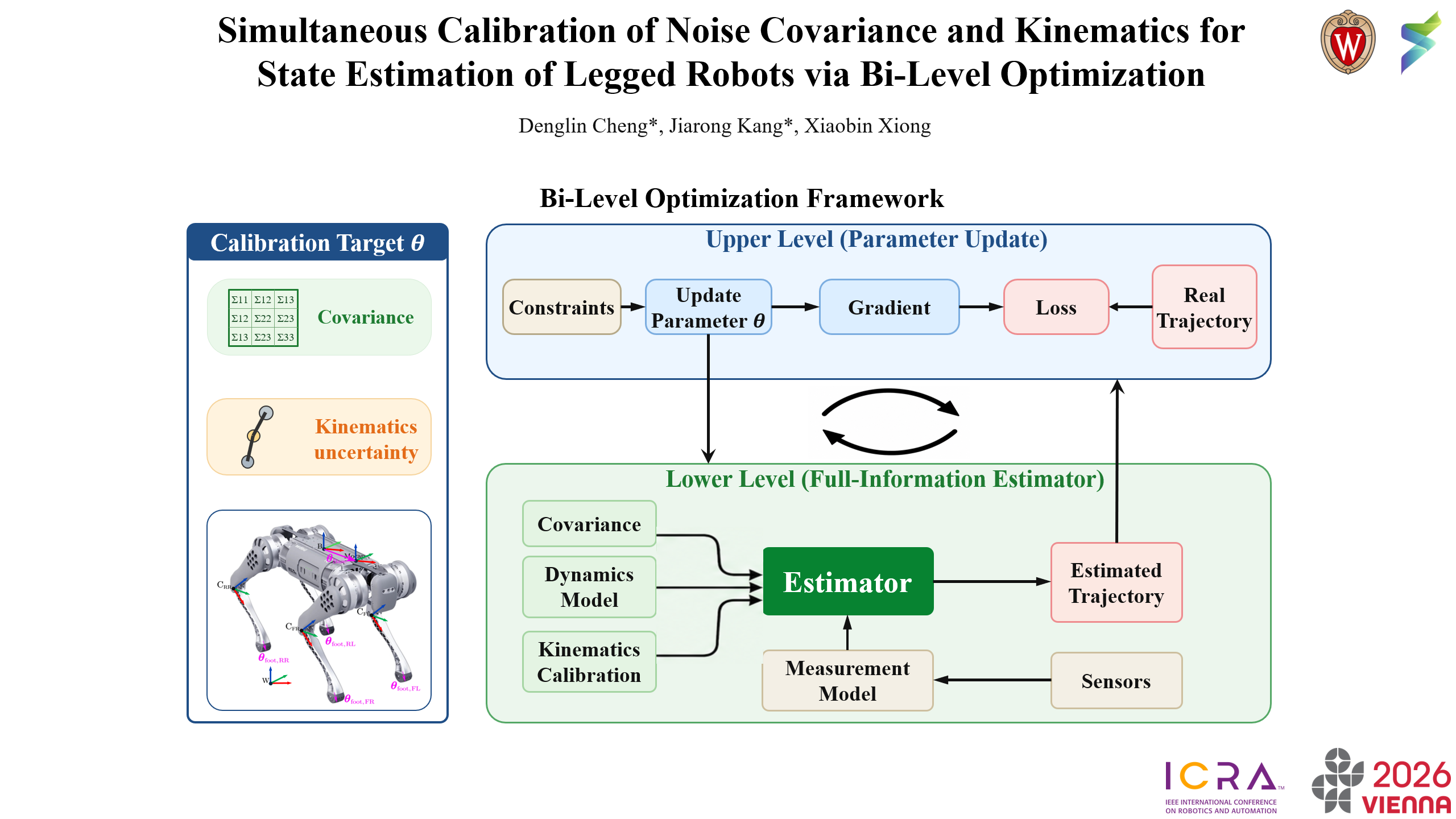
2026 ICRA Simultaneous Calibration of Noise Covariance and Kinematics for State Estimation of Legged Robots via Bi-level Optimization Denglin Cheng*, Jiarong Kang*, and Xiaobin Xiong IEEE International Conference on Robotics and Automation (ICRA), 2026 PDF Video Code Website