teaching
Courses I teach and assist.
ME646 — Robot Devices, Kinematics, Dynamics, and Control
Teaching Assistant at Johns Hopkins University, taught by Prof. Jin-Seob Kim
I served as a Teaching Assistant for ME646 at Johns Hopkins University — Robot Devices, Kinematics, Dynamics, and Control, taught by Prof. Jin-Seob Kim.
Topics include properties of rotation and transformation, exponential coordinates for rigid motion, twists and screws, introduction to Lie group and Lie algebra, rigid body velocity, screw coordinates for velocity and wrench, forward/inverse kinematics, the Jacobian, geometric singularities and manipulability, Lagrange’s equations and dynamics, and an introduction of control and stability theory.
Textbook: A Mathematical Introduction to Robotic Manipulation (Murray–Li–Sastry).
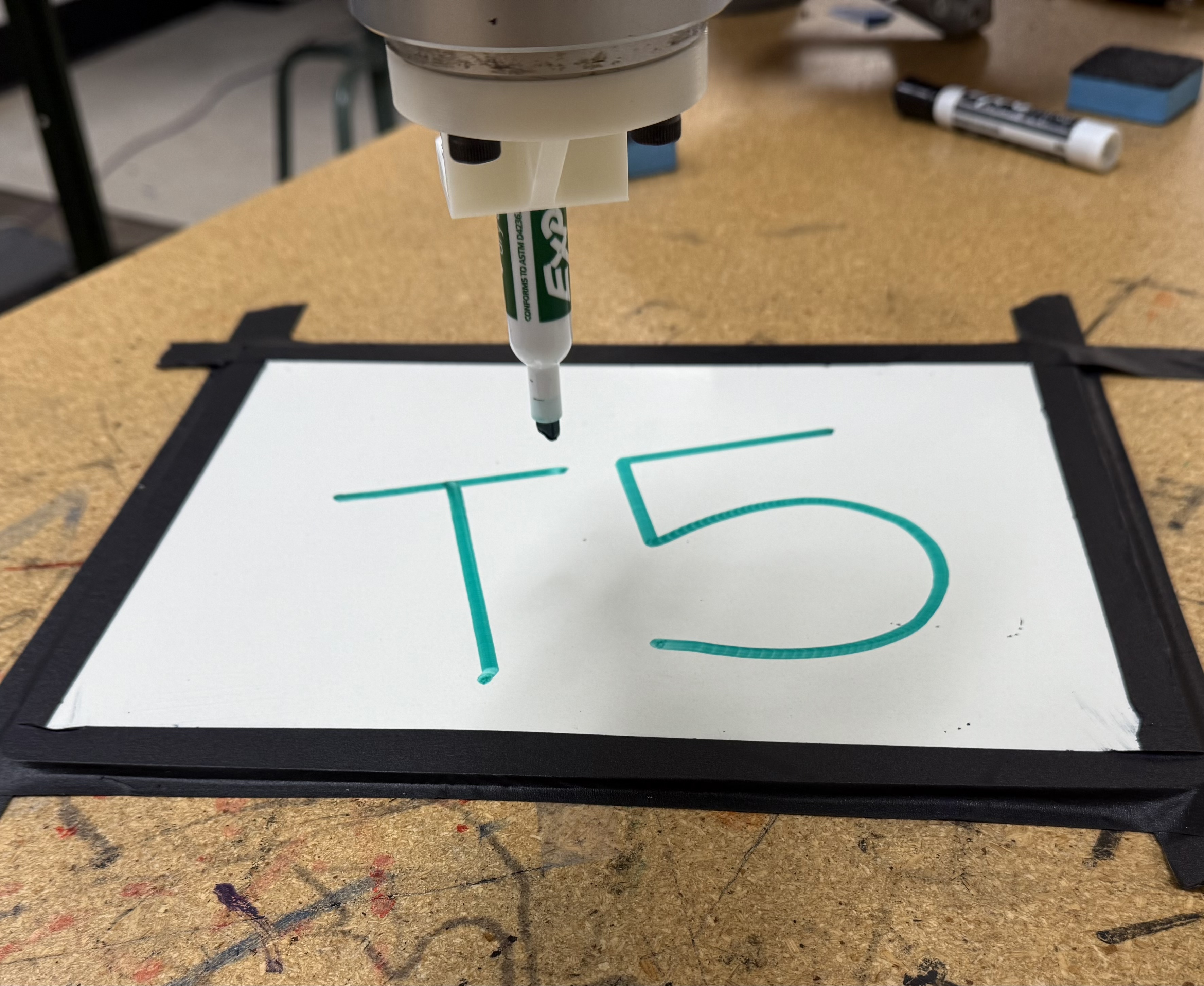
During my time as a student, my final project was implementing a smooth (TEAM 5) writing task.