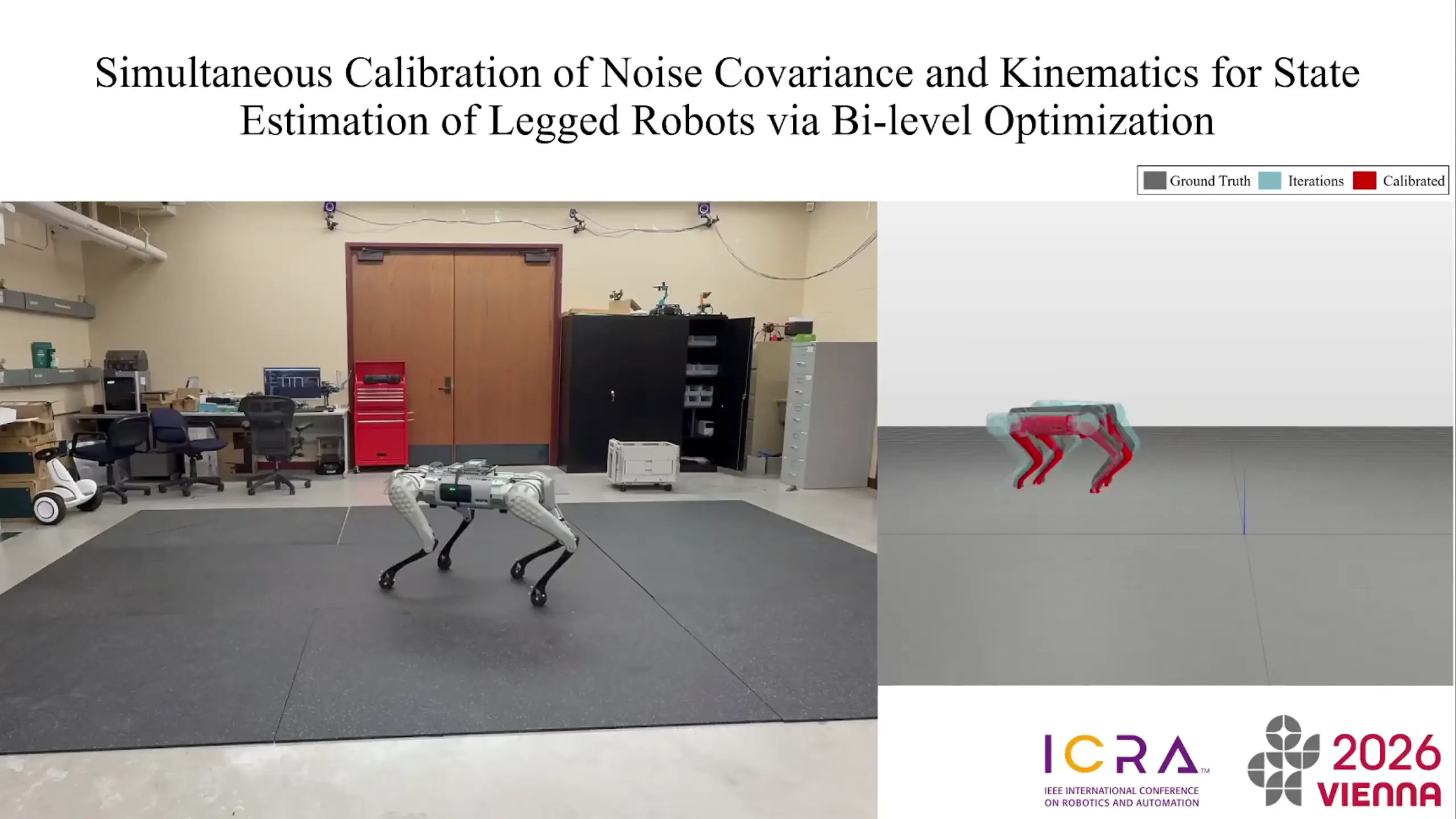
2026 ICRA Simultaneous Calibration of Noise Covariance and Kinematics for State Estimation of Legged Robots via Bi-level Optimization Denglin Cheng*, Jiarong Kang*, and Xiaobin Xiong IEEE International Conference on Robotics and Automation (ICRA), 2026 PDF Code Website 2023 Patents An activated carbon saturation multi-energy monitoring system for adsorbing VOCs Jiahuan Cui, Sijia Chen, Denglin Cheng, and 2 more authors Nov 2023 HTML