Denglin Cheng
Master’s Student in Robotics @ Johns Hopkins University.
Robotics • Optimization • Control • Estimation

About Me
I am a Master’s student in Robotics (MSE) at Johns Hopkins University, advised by Prof. Jin-Seob Kim. Before that, I completed my bachelor’s degree in Mechanical Engineering at Zhejiang University.
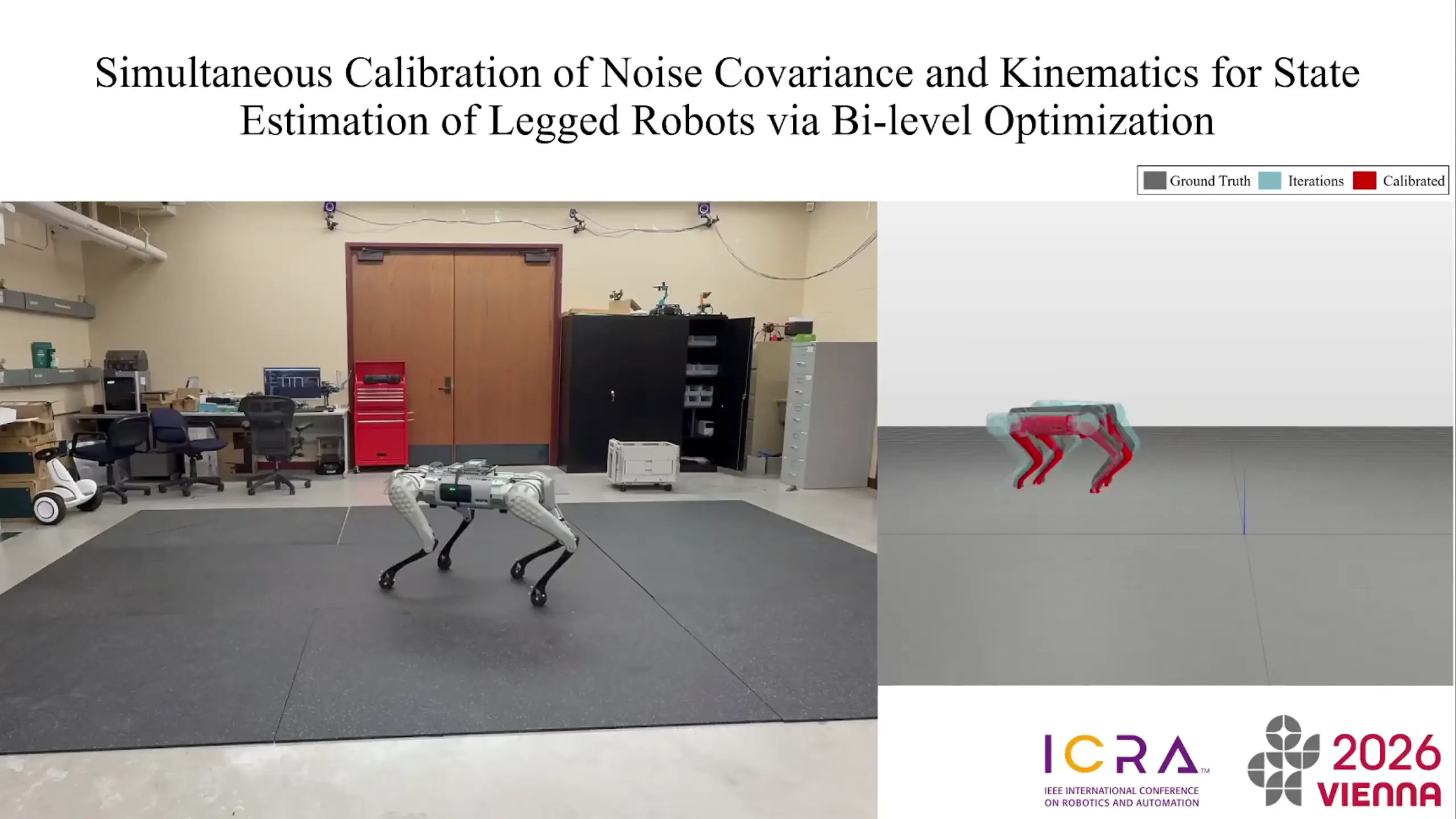
During the Spring and Summer of 2025, I was fortunate to work as a research assistant at the WELL Lab at the University of Wisconsin–Madison, with Prof. Xiaobin Xiong and Jiarong Kang on legged-robot state estimation and calibration.
My primary research goal is to enable dynamic robots to autonomously generate and robustly execute complex dynamic behaviors in different environments, by leveraging model-based optimization method.
Research Interests
Fast sequential convex optimization for nonlinear/nonconvex optimal control;
Assumption-aware, physics-based reasoning controller/estimator for robotics;
Hybrid model-based reasoning + data-driven methods for robust autonomy.
news
| Jul 21, 2025 | Preliminary result of our work Covariance Calibration for State Estimation on Mobile Robots via Bi-level Optimization will be presented at TC Virtual Poster Session and Networking Event 2025. |
|---|